废弃(1997)-支持文档
[TOC]
驾车路径规划 API 可以规划以小客车、轿车通勤出行的方案,并且返回通勤方案的数据。
# 1. 准备参数
##### (1) avoidroad输入框的参数:
避让道路名 只支持一条避让道路,填写需要避让道路的名称
##### (2) destination输入框的参数:
目的地 经度在前,纬度在后,经度和纬度用","分割,经纬度小数点后不得超过6位。
##### (3) destinationid输入框的参数:
目的地poiid 当终点为POI时,建议填充此值。(poiid参考POI参数表)
##### (4) destinationtype输入框的参数:
终点的poi类别 当用户知道终点POI的类别时候,建议填充此值。(poi类别参考POI参数表)
##### (5) number输入框的参数:
填入除省份及标点之外,车牌的字母和数字(需大写)。用于判断限行相关。
例如:NH1N11
##### (6) origin输入框的参数:
出发点 经度在前,纬度在后,经度和纬度用","分割,经纬度小数点后不得超过6位。
由于在实际使用过程中,存在定位飘点的情况。 为了解决此类问题,允许传入多个起点用于计算车头角度。规划路径时以最后一个坐标对进行规划。 格式为x1,y1|x2,y2|x3,y3。 最多允许传入3个坐标对,每对坐标之间距离必须超过2m。 虽然对每对坐标之间长度没有上限,但是如果超过4米会有概率性出现不准确的情况。
##### (7) originid输入框的参数:
出发点poiid 当起点为POI时,建议填充此值。(poiid参考POI参数表)
##### (8) origintype输入框的参数:
起点的poi类别 当用户知道起点POI的类别时候,建议填充此值(poi类别参考POI参数表)
##### (9) province输入框的参数:
用汉字填入车牌省份缩写,用于判断是否限行 例如:京
##### (10) strategy输入框的参数:
驾车选择策略 下方策略 0~9的策略,仅会返回一条路径规划结果。 下方10~20的策略,会返回多条路径规划结果。(高德地图APP策略也包含在内) 下方策略仅返回一条路径规划结果
0,不考虑当时路况,返回耗时最短的路线,但是此路线不一定距离最短
1,不走收费路段,且耗时最少的路线
2,距离最短的路线,但是不会考虑路况
3,不走快速路,例如京通快速路
4,躲避拥堵的路线,但是可能会存在绕路的情况,耗时可能较长
5,多策略(同时使用速度优先、费用优先、距离优先三个策略计算路径)。 其中必须说明,就算使用三个策略算路,会根据路况不固定的返回一~三条路径规划信息。
6,不走高速,但是不排除走其余收费路段
7,不走高速且避免所有收费路段
8,躲避收费和拥堵,可能存在走高速的情况,并且考虑路况不走拥堵路线,但有可能存在绕路和时间较长
9,不走高速且躲避收费和拥堵 下方策略返回多条路径规划结果
10,返回结果会躲避拥堵,路程较短,尽量缩短时间
11,返回结果时间最短,距离最短 (由于有更优秀的算法,建议不使用此值)
12,返回的结果考虑路况,尽量躲避拥堵而规划路径,与高德地图的“躲避拥堵”策略一致
13,返回的结果不走高速,与高德地图“不走高速”策略一致
14,返回的结果尽可能规划收费较低甚至免费的路径,与高德地图“避免收费”策略一致
15,返回的结果考虑路况,尽量躲避拥堵而规划路径,并且不走高速,与高德地图的“躲避拥堵&不走高速”策略一致
16,返回的结果尽量不走高速,并且尽量规划收费较低甚至免费的路径结果,与高德地图的“避免收费&不走高速”策略一致
17,返回路径规划结果会尽量的躲避拥堵,并且规划收费较低甚至免费的路径结果,与高德地图的“躲避拥堵&避免收费”策略一致
18,返回的结果尽量躲避拥堵,规划收费较低甚至免费的路径结果,并且尽量不走高速路,与高德地图的“避免拥堵&避免收费&不走高速”策略一致
19,返回的结果会优先选择高速路,与高德地图的“高速优先”策略一致 20,返回的结果会优先考虑高速路,并且会考虑路况躲避拥堵,与高德地图的“躲避拥堵&高速优先”策略一致
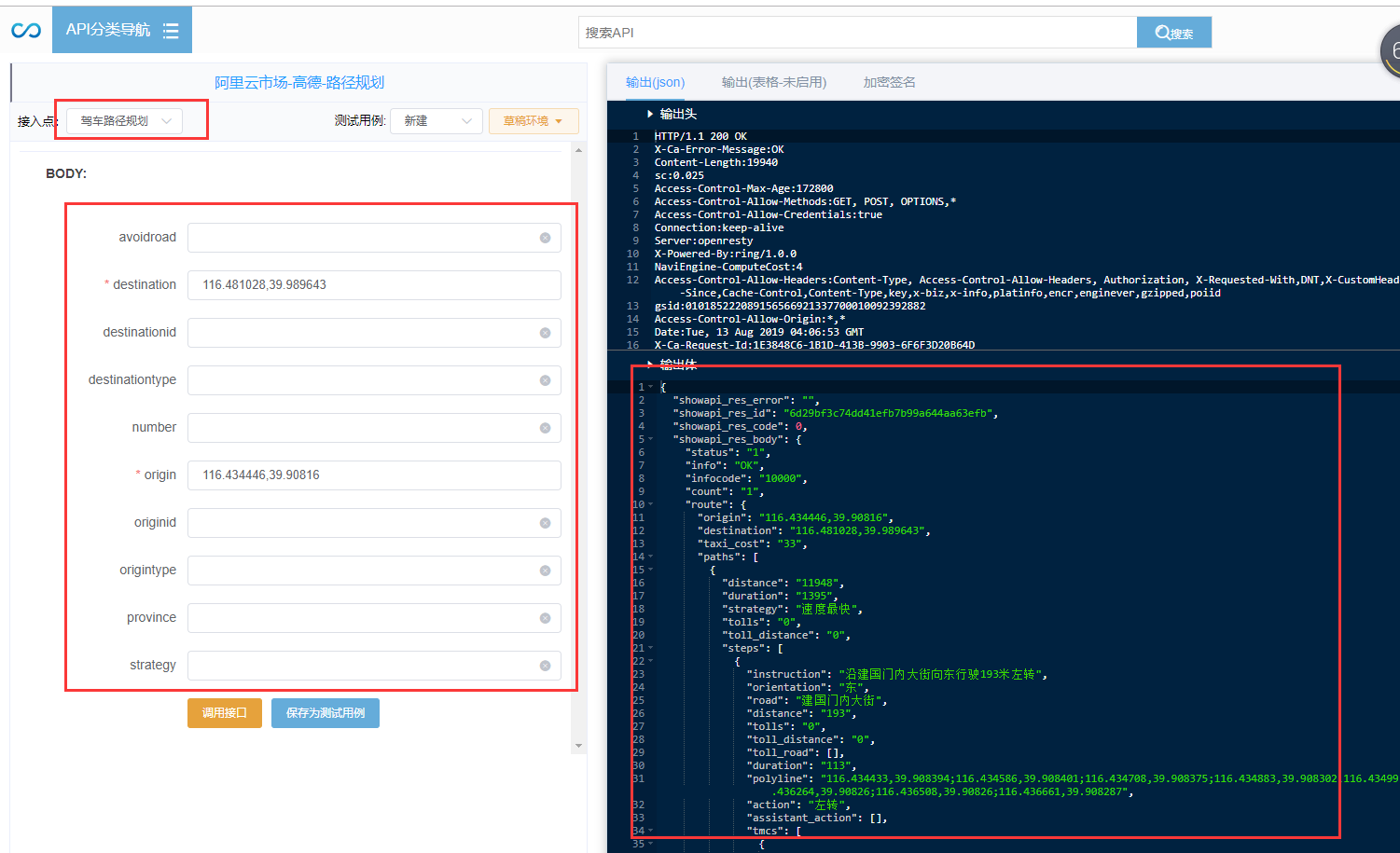
# 2. 在易源测试页面进行调用
进入[易源测试界面](https://www.showapi.com/apiGateway/onlineTest?env=draft&apiCode=1997&pointCode=2 "易源测试界面"),输入上述参数并进行调用,结果如图: